科数网
试题 ID 6465
【所属试卷】
程守洙 江之勇主编《普通物理学》
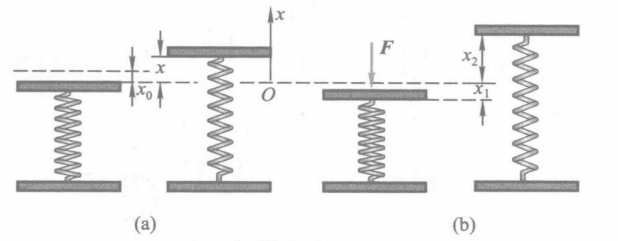
用一弹簧将质量分别为 $m_1$ 和 $m_2$ 的上下两水平木板连接如图 2-36 所示, 下板放在地 面上. (1) 如以上板在弹簧上的平衡静止位置为重力势能和弹性势能的零点, 试写出上 板、弹簧以及地球这个系统的总势能 . (2) 对上板加多大的向下压力 $F$, 才能因突然撤去 它,使上板向上跳而把下板拉起来?
A
B
C
D
E
F
答案:
答案与解析仅限VIP可见
解析:
答案与解析仅限VIP可见
用一弹簧将质量分别为 $m_1$ 和 $m_2$ 的上下两水平木板连接如图 2-36 所示, 下板放在地 面上. (1) 如以上板在弹簧上的平衡静止位置为重力势能和弹性势能的零点, 试写出上 板、弹簧以及地球这个系统的总势能 . (2) 对上板加多大的向下压力 $F$, 才能因突然撤去 它,使上板向上跳而把下板拉起来?<br> <img src=/uploads/2023-04/e32ef5.jpg > <div> </div> <br /> <br /> <b>答案</b> <div> 答案与解析仅限VIP可见 </div> <br /> <br /> <b>解析</b> <div> 答案与解析仅限VIP可见 </div>